|
I am a PhD student at MIT working with Professor Pulkit Agrawal in the Improbable AI lab. I am currently investigating how tactile perception can enable more robust and dexterous robotic manipulation. I have also spent time as a Student Researcher at Google Deepmind London, and as a Research Intern with Mitsubishi Electric Research Labs (MERL). I did my Masters with Professor Alberto Rodriguez in the MCube Lab. Prior to MIT, I got my bachelor's in Mechanical Engineering at UC Berkeley. I won the Steidel Award for undergraduate research, working with Professor Oliver O'Reilly on nonlinear dynamics, and Professor Alice Agogino on tensegrity robots. Email / CV / LinkedIn / Twitter / Google Scholar |

|
|
I am interested in physical robot intelligence, and in particular, the role of tactile feedback in reactive control of dexterous manipulation. My recent work has centered methods for solving precise manipulation tasks that leverage tactile feedback. |
|
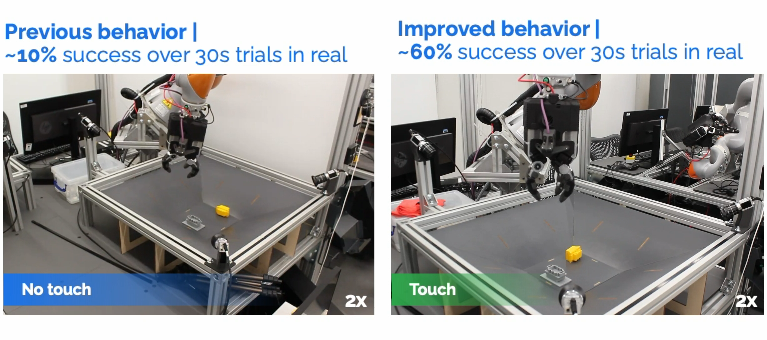
Antonia Bronars, Nimrod Gileadi, Jose Enrique Chen, Zilin Si, Franceso Nori, Nicolas Heess, Konstantinos Bousmalis, Maria Bauza, Towards Human Level Intelligence Vision and Tactile Sensing (ICRA Workshop), 2025 project page / pdf We find that touch helps us discover robust behaviors in simulation using demonstration-guided RL that transfer better to the real world zero-shot. |

|
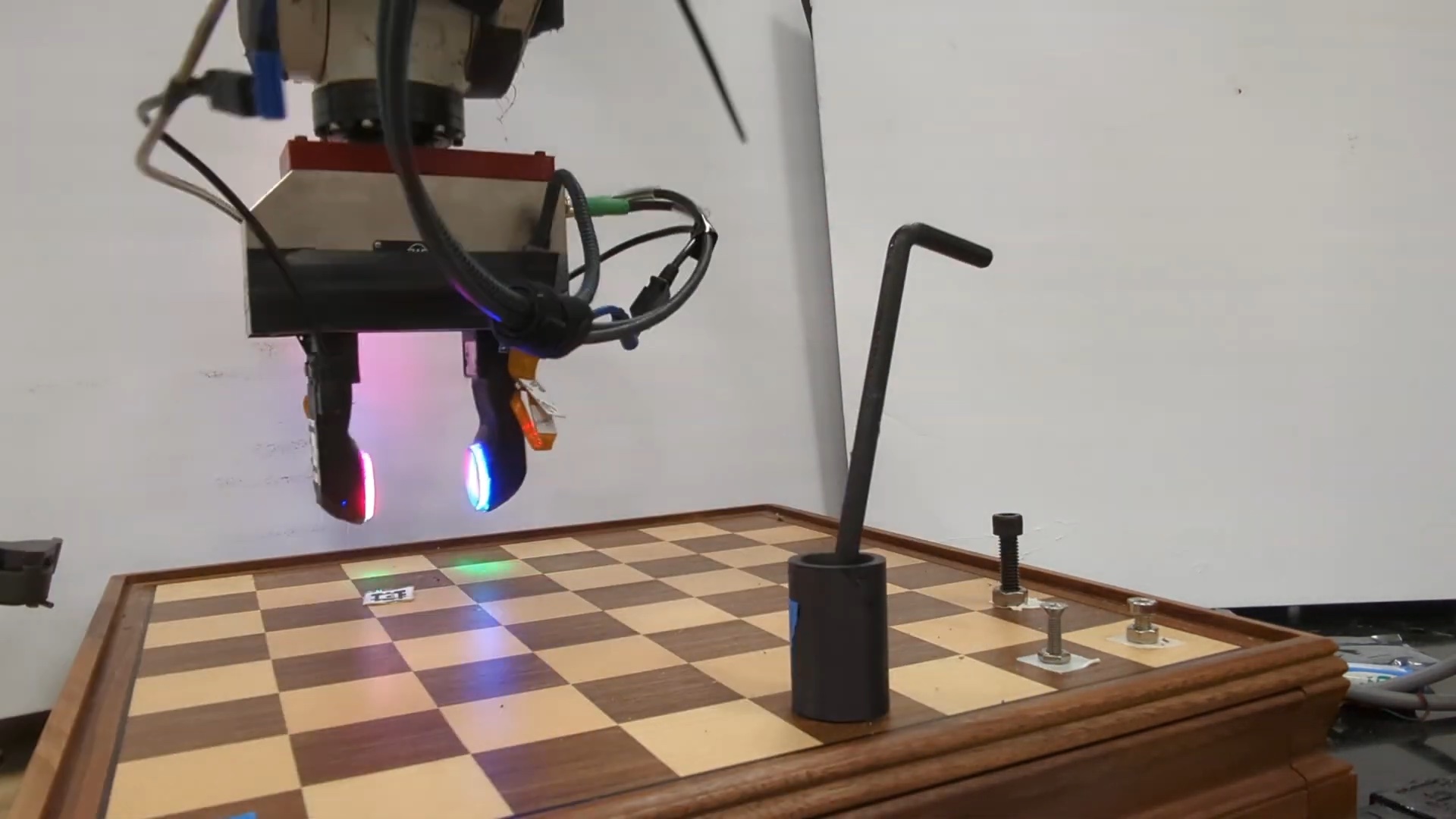
Annie S. Chen, Philemon Brakel, Antonia Bronars, Annie Xie, Sandy Huang, Maria Bauza, Marcus Wulfmeier, Nicolas Heess, Dushyant Rao International Conference on Intelligent Robots and Systems (IROS) , 2025 project page / pdf We use pause-induced pertubations (PIP) to overcome policy idling and improve dexterous manipulation. |
|
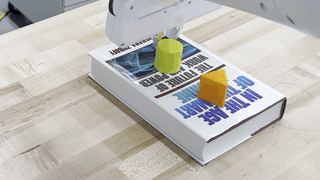
Aviv Netanyahu, Yilun Du, Antonia Bronars, Jyothish Pari, Joshua B. Tenenbaum, Tianmin Shu, Pulkit Agrawal Conference on Neural Information Processing Systems (NeurIPS) , 2024 project page / arXiv / video / code We approach few-shot continual learning via generative modeling. |

|
Kei Ota, Devesh Jha, Siddarth Jain, Bill Yarazunis, Radu Corcodel, Yash Shukla, Antonia Bronars, Diego Romeres, International Conference on Intelligent Robots and Systems (IROS) , 2024 video / arXiv Our framework fuses several manipulation skills including grasping, in-hand manipulation, and insertion to assemble a gear box by leveraging visuotactile and force-torque data. |
|
Antonia Bronars*, Sangwoon Kim*, Alberto Rodriguez International Conference on Robotics and Automation (ICRA) , 2024 video / arXiv Our framework estimates and tracks object pose using tactile images while simultaneously generating motion plans to achieve manipulation objectives. |
|
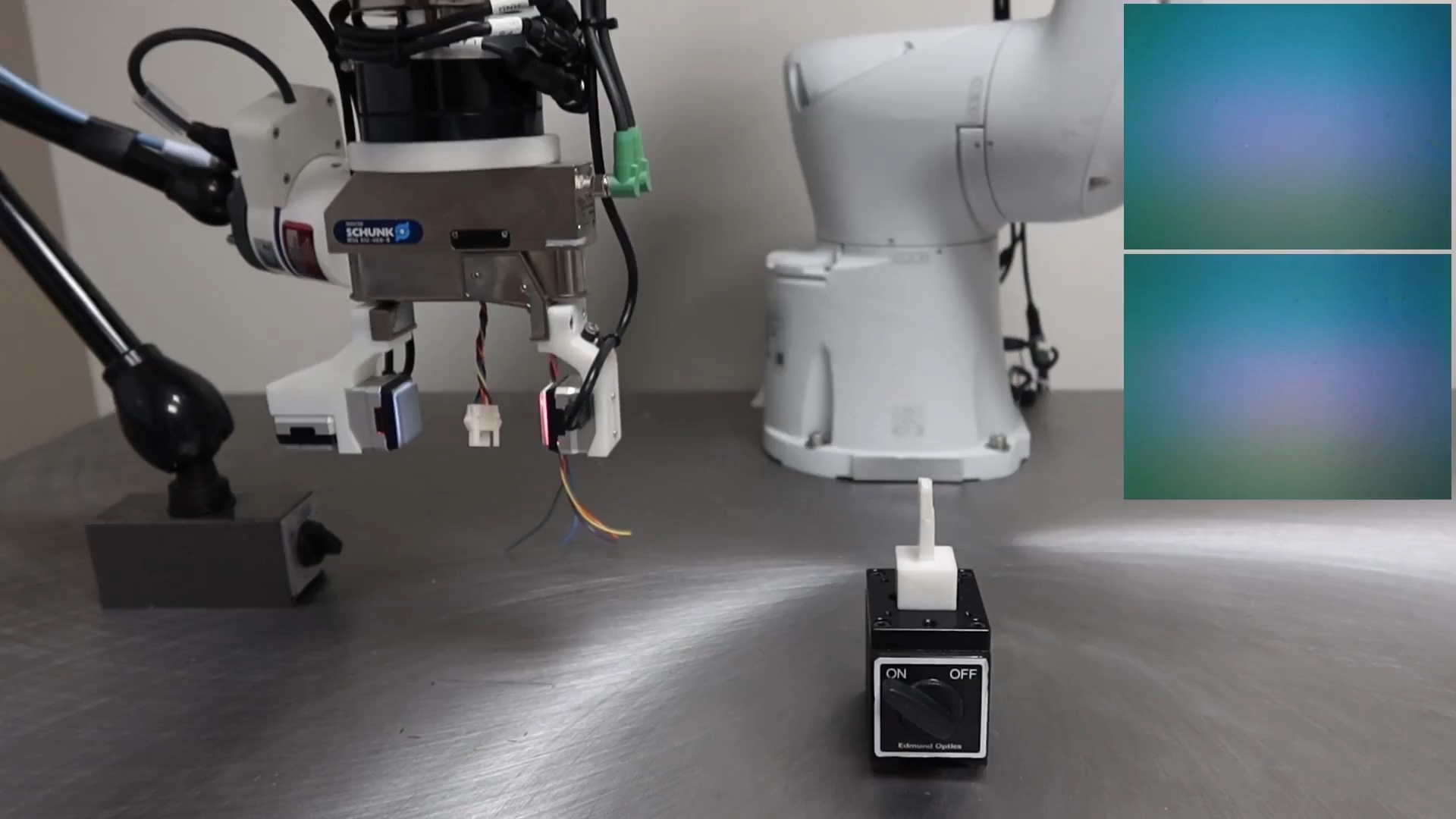
Antonia Bronars, Devesh Jha, Radu Corcodel Towards Human Level Intelligence Vision and Tactile Sensing (ICRA Workshop), 2025 We assemble tight-tolerance industrial connectors using a only simple controller, without the need for specialized search or insertion algorithms. This is possible via high-accuracy tactile pose estimation. |
|
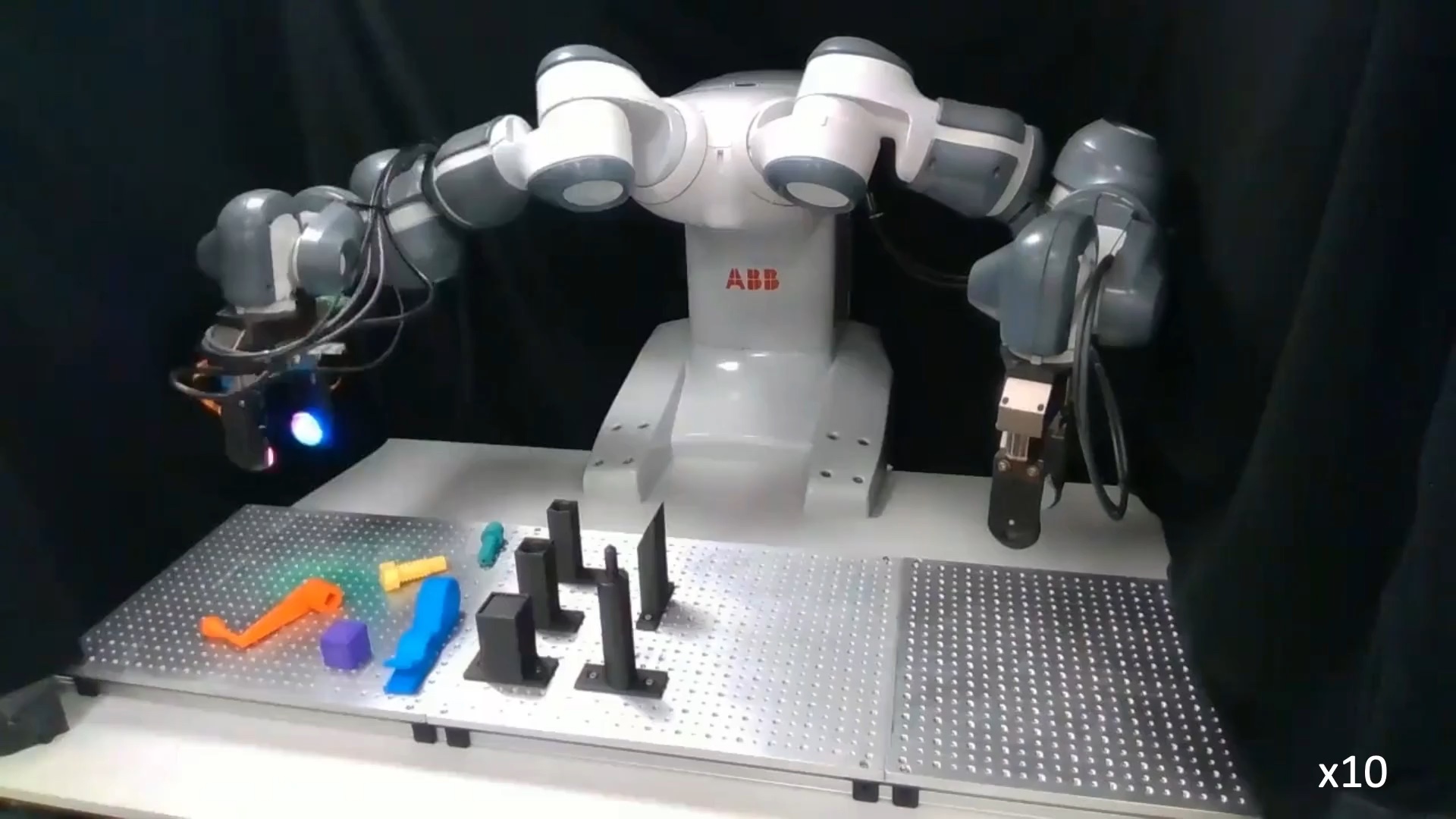
Maria Bauza, Antonia Bronars, Yifan Hou, Ian Taylor, Nikhil Chavan-Dafle, Alberto Rodriguez Science Robotics, 2023 video / arXiv simPLE learns to pick, regrasp, and place objects precisely given the object CAD model. We develop three main components: task-aware grasping, visuotactile perception, and regrasp planning. |

|
Antonia Bronars*, Maria Bauza*, Alberto Rodriguez International Journal of Robotics Research (IJRR), 2022 arXiv Given an object's CAD model, we learn a tailored perception model in simulation that estimates a probability distribution over possible object poses given a real tactile observation. Our solution is used by Magna, ABB, and MERL.
|

|
Antonia Bronars, Oliver O'Reilly Proceedings of the Royal Society A, 2019 paper We analyze the self-induced jumping behavior of a rolling hoop, and show that the paradoxical motions - first noted by mathematician John Littlewood - are consistent with the principles of mechanics.
|
|
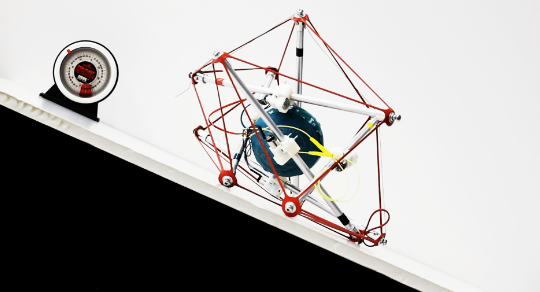
Lee-Huang Chen, Brian Cera, Edward Zhu, Riley Edmunds, Franklin Rice, Antonia Bronars, Ellande Tang, Saunon Malekshahi, Osvaldo Romero, Adrian Agogino, Alice Agogino International Conference on Intelligent Robots and Systems (IROS), 2017 arXiv Novel control scheme centered around simultaenous actuation of multiple cables enables fast, robust climbing on inclined surfaces.
|
|
Website source code
|